


正如你所見,眼前這輛外表可愛且超級吸睛的車輛名為「WinBus」,是不久前才在經濟部發表的首輛國人自研自製MIT自駕電動小型巴士,其命名是由網路徵名活動而來,除了有字面上「贏」的意思,帶領台灣自駕車迎向未來,若以台語發音也有「穩」的涵義,而這也是無人車發展及營運中最重要的一環!
而為了讓媒體近距離體驗MIT無人駕駛車輛「WinBus」的全方位魅力,財團法人車輛研究測試中心(後稱ARTC)特別於鄰近的鹿港彰濱工業區舉辦「WinBus自駕小巴足鹿彰濱」體驗會,還將觀光與大眾運輸作結合,串聯周邊觀光工廠之公共接駁運行服務,自動駕駛不再只是封閉場域內自爽的高科技奢侈品,而是真的走向大眾的交通載具。
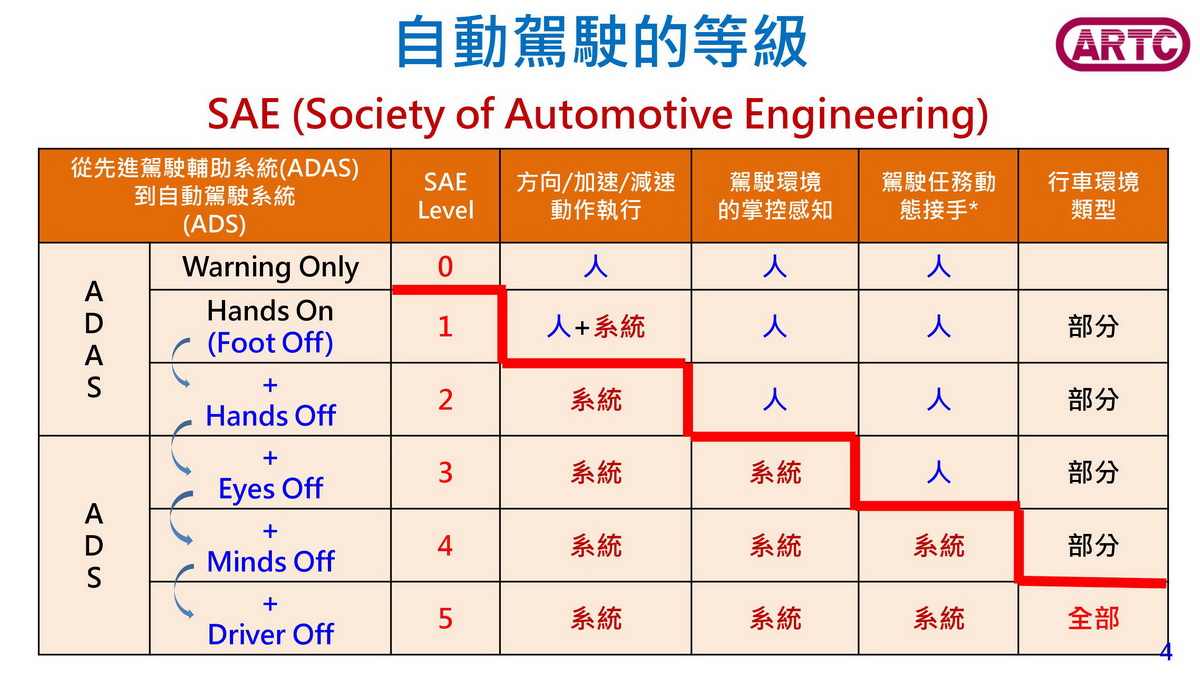 美國汽車工程師協會規範的自動駕駛分級
美國汽車工程師協會規範的自動駕駛分級
寫在WinBus首航初體驗之前,其實內是無比喜悅而且充滿感動,因為筆者也算是「看著它長大的啊」。這話怎麼說呢?因為當國際潮流紛紛壓寶「自動駕駛」時,擁有關鍵IT資通產業實力的台灣,理應不能缺席這塊產值高達10兆美元的市場大餅之爭,因此政府近年來大力支持「自動駕駛」產業鏈的發展,身為國內汽車科技研發領導者的ARTC自然被委以重任,數次的「自動駕駛」成果發表會也是讓人眼睛為之一亮,從高爾夫球車、Luxgen U6等改裝車,再到最新的WinBus,看著國造自駕越來越成熟,從封閉場域走向公共示範道路,心裡滿是感動與期待。

WinBus的誕生其實並不容易,因為這包含「國家機器」要動起來之外,還要聯合產官學研通力合作,從脈絡來看,必須追溯到10多年前。在經濟部技術處科技專案支持下,ARTC近年來將研發能量投放在自動駕駛身上,從2007年起即投入先進駕駛輔助系統(ADAS)的研發,陸續發表了國人自主開發諸如盲點偵測、含行人偵測自動緊急煞車、自動停車輔助、自動跟車、自動取車等令人為之驚豔的技術,部分甚至已經技術轉移,不只扮演國產車駕駛輔助系統技術水平提升的推手,更是邁向MIT自動駕駛的先河。
利基於ADAS的基礎,從2015年開始便一步步落實「輔助 > 智駕 > 自駕 > 無人」的自駕車發展階段,而ARTC也在2017年首度發表用於示範「定點接駁自駕」的高爾夫球改裝,以及用於「一般道路自駕」的Luxgen U6改裝車,有了這些前置車輛的成功經驗後,2018年5月才開始投入開發MIT自駕小型巴士,也就是現在你所看到的「WinBus」。
不過加速自駕車上路,必須是整個產業鏈的事,因此國內也在2018年底成立了國內第一支集合產官學的「自駕車產業聯盟」,法規面的推行也雙線進行,立院通過了《無人載具科技創新實驗條例》,參考了世界各國有關無人載具的相關立法,導入監理沙盒(Regulatory Sandbox)精神,賦予各類無人載具在可控風險的一般環境進行實驗的法源基礎,以兼顧安全性及創新科技的時效需求,促進產業技術及服務應用發展,成為台灣迎接無人駕駛時代的起點。


種種的努力及鋪陳之下,終於催生台灣第一輛MIT自研自製的無人駕駛車,是經濟部科技專案下的重要產業革命,由ARTC主導,集結國內車輛上下游關鍵零組件與系統,包含底盤、動力、電能、車體打造、感知、決策控制、聯網及營運服務等20家以上廠商,自研自製、從無到有,群策合力而生的鉅作,目標是走向量產商業化,並且輸出海外。
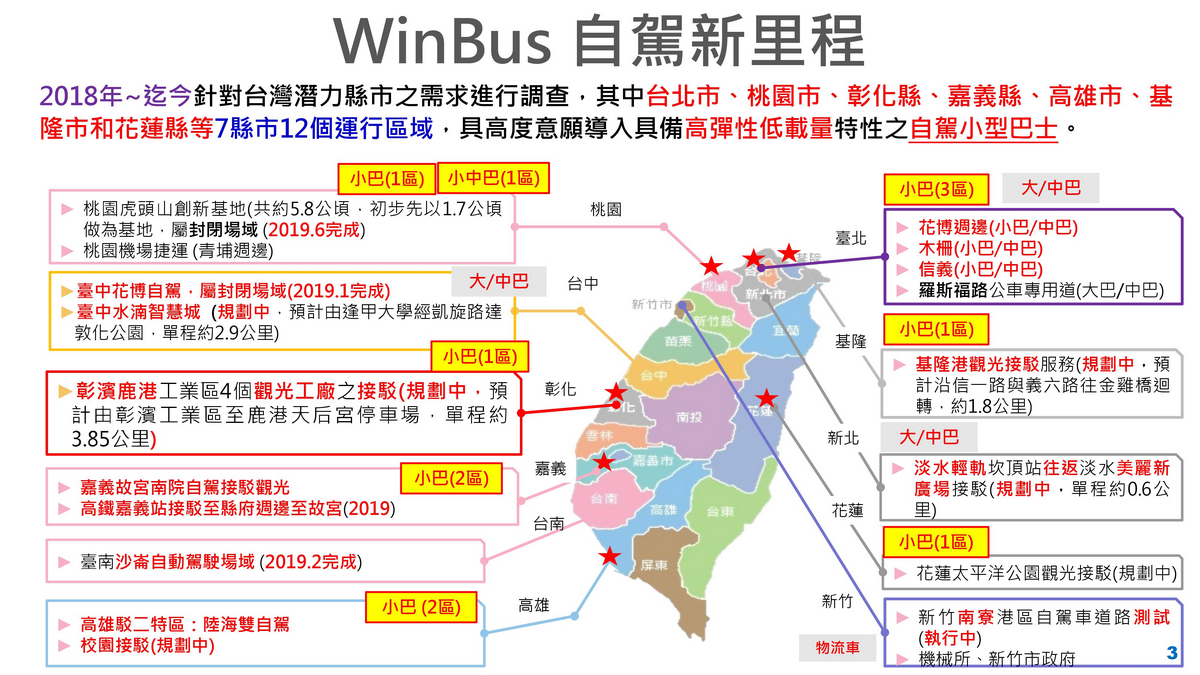
據了解,目前國內僅有這一輛WinBus,從無到有一共花費了近4千萬打造,而官方預估未來投入量產單輛製作成本必須落在1,200-1,500萬才能達到規模經濟的水平,而且據目前為止針對台灣潛力縣市之需求進行調查,其中台中市、桃園市、彰化縣、嘉義縣、高雄市、基隆市、花蓮縣等7縣市12個運行區域,具高度意願導入具備高彈性低載量特性的自駕小型巴士,因此可以期待未來在這些城市看到WinBus穿梭觀光景點。


參考自國外自駕車運行以公共接駁模式為最多,因此WinBus才會以主流的小型巴士為主軸,設定最多乘載人數為15人(9座位+6站位),類似火柴盒相當討喜,而這也是目前全球自駕車的外型設計趨勢,大概就像是Google自駕車一樣走可愛路線,目地是為了拉攏群眾、降低人們對於「無人駕駛」的不信任感,為了迎合節能減碳、綠能轉型,WinBus的動力來源也採用電動車配置,搭載85kW的電動馬達並由45kWh的電池容量供電,最大續航里程理想值可達70km以上,極速可達50km/h,巡航狀態時則為30km/h,除了一般插頭式充電座外,目前也有開發無線充電,另外現場也有媒體問及配備太陽能面板的可行性,工程師提到其實這在開發之初確實就有想到,只不過一來是市售矽晶太陽能電池的轉換效率僅約15%切會有衰竭的問題,二來是太陽能面板並不輕,增加的重量與回充的電量不成正比。
.jpg)
.jpg)
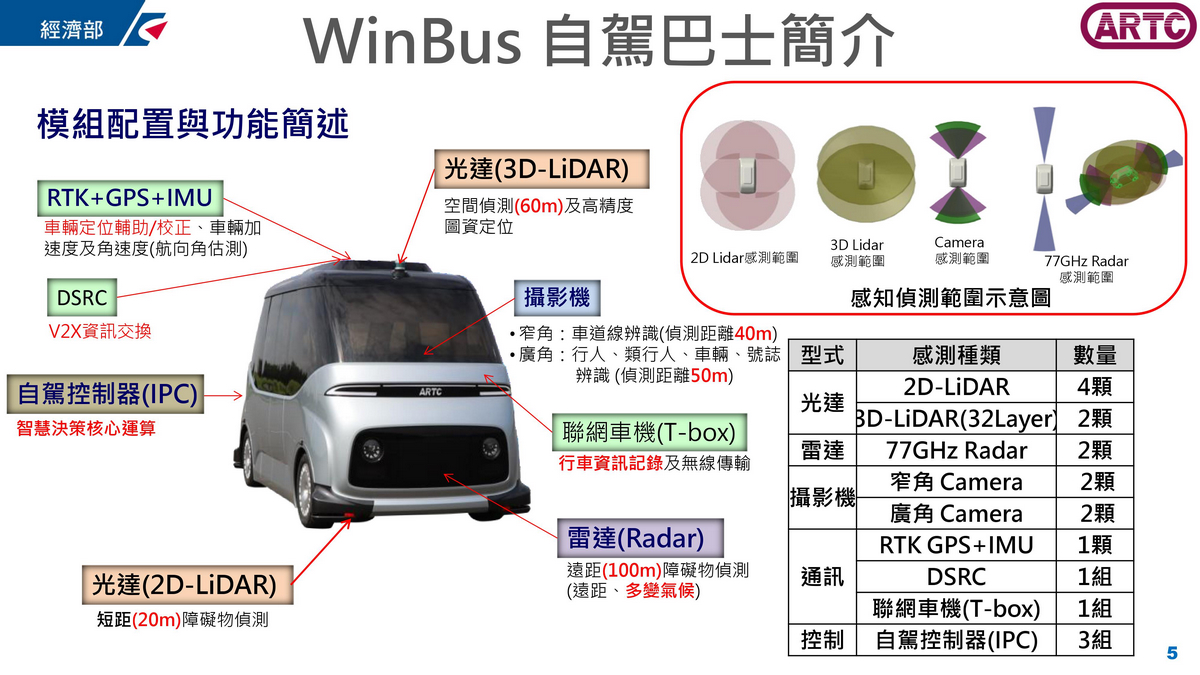
而全台首輛WinBus之所以會造價不斐,多半費用是花在車台及車體的打造上,畢竟國內欠缺自主小巴平台可供自動駕駛系統搭載,全車由超多種偵測器構成,包含車頂頭尾的2顆3D-LiDAR光達,負責空間偵測及高精度圖資定位,還有車輛定位輔助/校正、車輛加速度及航向角估測的PTK+GPS+IMU模組及DSRC交通標誌資訊交換;前擋風玻璃上裝有窄角及廣角攝影機,前者負責車道線辨識,而後者則用來偵測行人、車輛、號誌等;車頭則裝有行車資訊紀錄及無線傳輸的聯網車機,以及負責遠距(100m)障礙物偵測的77GHz雷達,而車輛下緣四個角落各裝有1個短距(20m)障礙物偵測的2D-LiDAR光達,相互涵蓋構成一個感知偵測範圍網,再加上車內並無人為駕駛介面,達到美國汽車工程師協會(SAE)的Level 4高度自動駕駛(High Automation)階段。

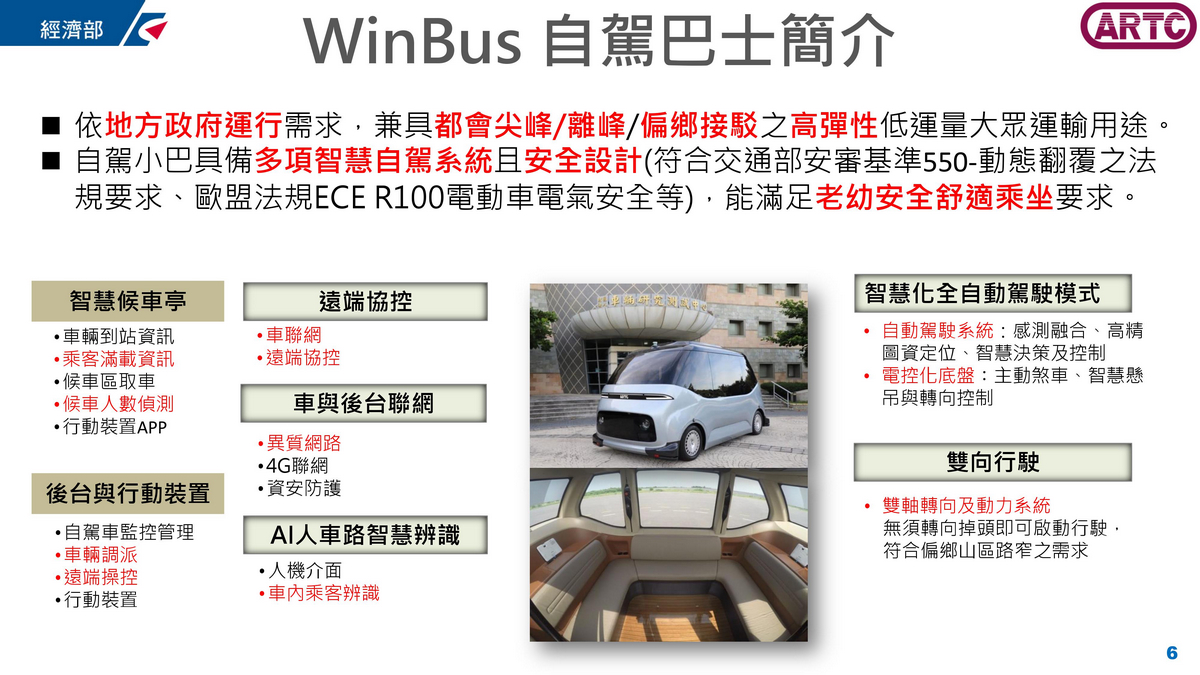
目前國內汽車市場最常見的應該是Level 2自動駕駛,畢竟國產車新一代Ford Focus就具備此功能,基本上系統幫你控制方向/加減速,但駕駛環境的掌握感知、駕駛任務動態接手還是由人做決定,而Level 3則是將駕駛環境的掌握感知改由系統作主,因此在部分路段(例如高速公路)就可以完全依賴自動駕駛,至於Level 4則是再將駕駛任務動態接手全權交由系統決定,也就不需要所謂傳統人為操作介面,因此諸如方向盤、煞車/油門踏板等在WinBus上都看不到,此外WinBus內部是以遊艇的概念打造,所以採用環艙式的設計,地板則鋪上木紋飾板。


由於國內交通環境相對複雜,經思考後才會以ARTC所在的彰濱工業區作為WinBus首航的起點,希望結合古樸的鹿港小鎮、鄰近的特色觀光工廠,讓自駕走入大眾,變成商業化的觀光接駁車運行模式,不過我想無人自駕的WinBus可能還比觀光景點還吸睛吧,從當天現場民眾搶著拍照就可以看出端倪!




WinBus首航體驗從車輛中心出發到台灣玻璃博物館,全程4.4公里,途經無號誌T字路口、行人/類行人辨識後會採取適應性煞車動作、快車道切入慢車道右轉、直行遇前車緩煞停、紅綠燈號誌、十字路口左轉以及到站停車等七種實際路況,未來將先行串連起五家觀光工廠與鹿港天后宮停車場間的觀光接駁,將每年天后宮百萬參觀人次導引至其他景點,除了是觀光產業的活化之外,也希望能帶動彰化鹿港之科技人才進駐與產業轉型。




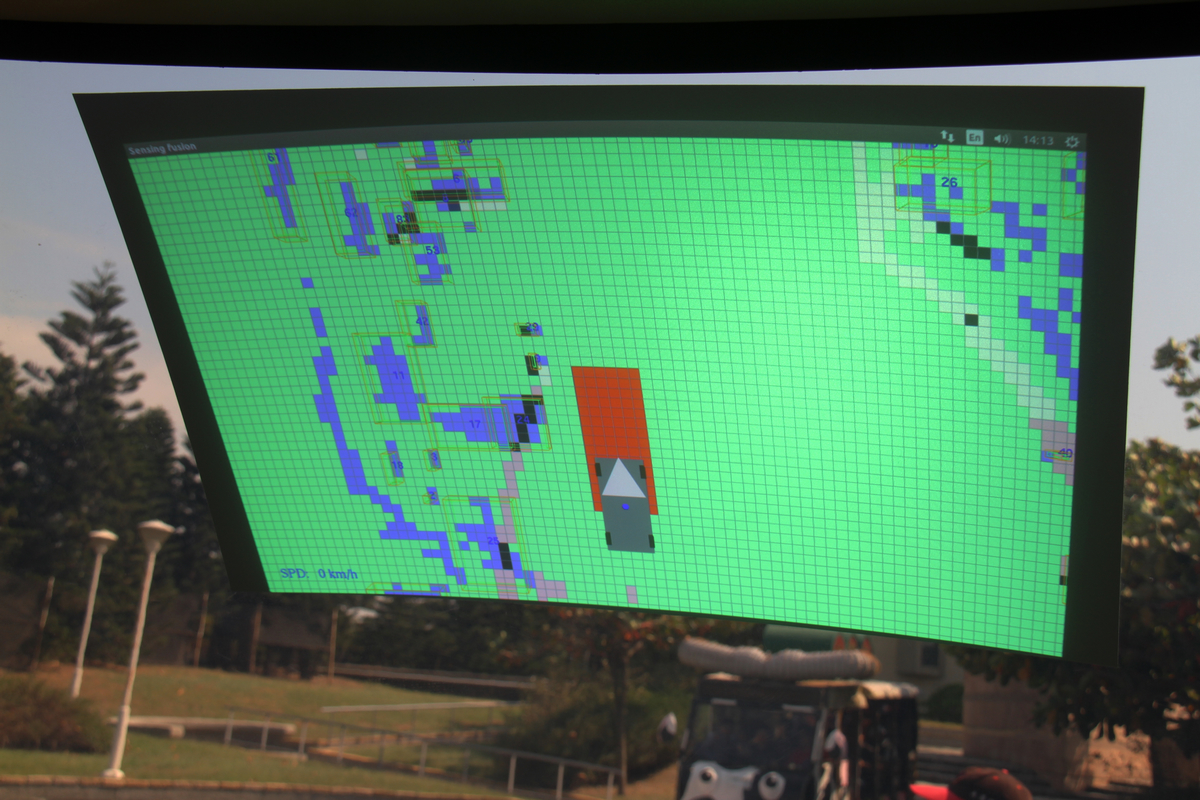

除了WinBus超討喜的長相外,更令人滿意的是它的自動駕駛本事,從車輛中心出發後,基本上都能相當精準的保持在車道線内,偵測到前方有車輛/行人或交通號誌紅燈時也都會適當的煞車減速,一般而言力道都算是相當和緩,不過目前還處於沙盒測試階段,因此工程師為求安全設定就比較保守,所以數度因為四周圍的光達偵測到分隔島過長的雜草因隨風搖曳勿入警戒區而急煞,之後都會再作系統判讀上的調整。
.jpg)



最令筆者驚艷的還是快車道切入慢車道右轉以及十字路口左轉兩項決策,畢竟這對一般人為駕駛來說都是需要經過再三確認才能執行,對自動駕駛的判斷肯定是難上加難。雖然在這次WinBus首航的體驗中,官方有派出前方引導車及壓尾車各一輛,不少路口也有安排工作人員指揮其它車流,但WinBus透過系統自主判斷進而順暢的完成左右轉彎的動作,並且一氣呵成的迅速回到車道内,臉上的喜悅真的藏不住,想必你會跟我一樣不由自主的給它掌聲,以回敬它的精彩表現,真的不要再說「外國月亮比較圓」這種歪理了,台灣自研自製的WinBus確實早已接軌國際,甚至有望站上領導地位,老實說,相較於國產汽車工業的不爭氣,自動駕駛確實更有機會在國際車壇上發光發熱。







