

藉此,也可在未來讓立法者能夠在完全虛擬的環境中定義車輛的審批流程,並證明其在真實道路上使用是安全的,該技術目前已被用於驗證Euro NCAP測試中的車輛安全性。
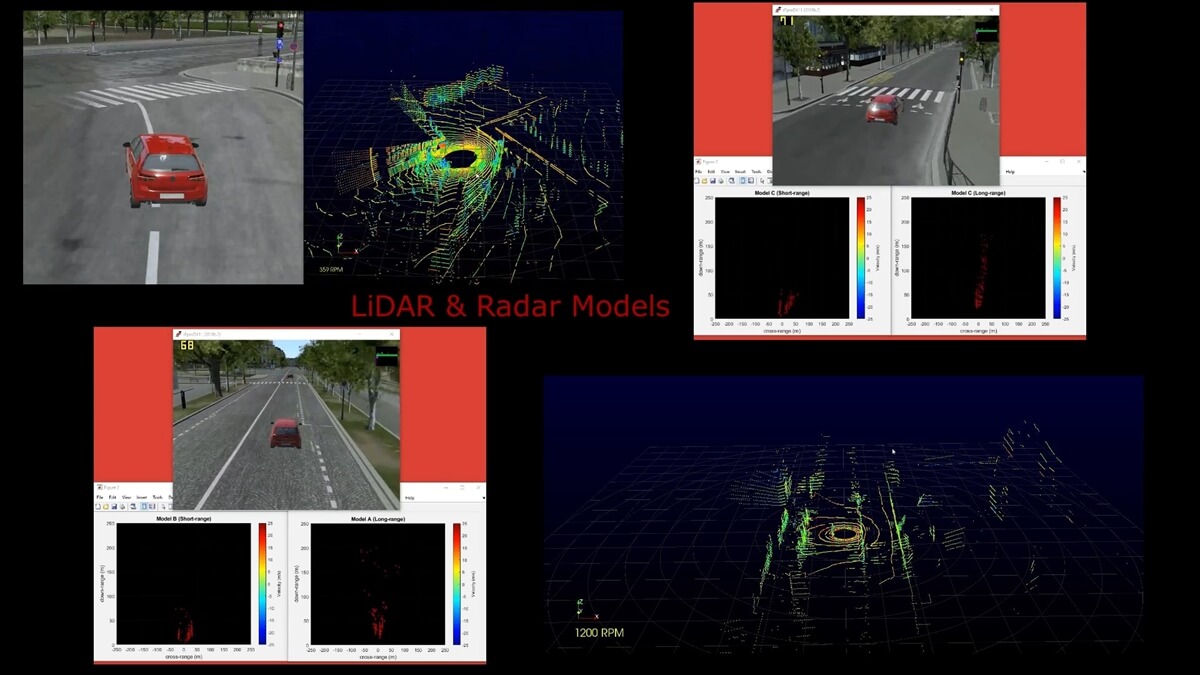
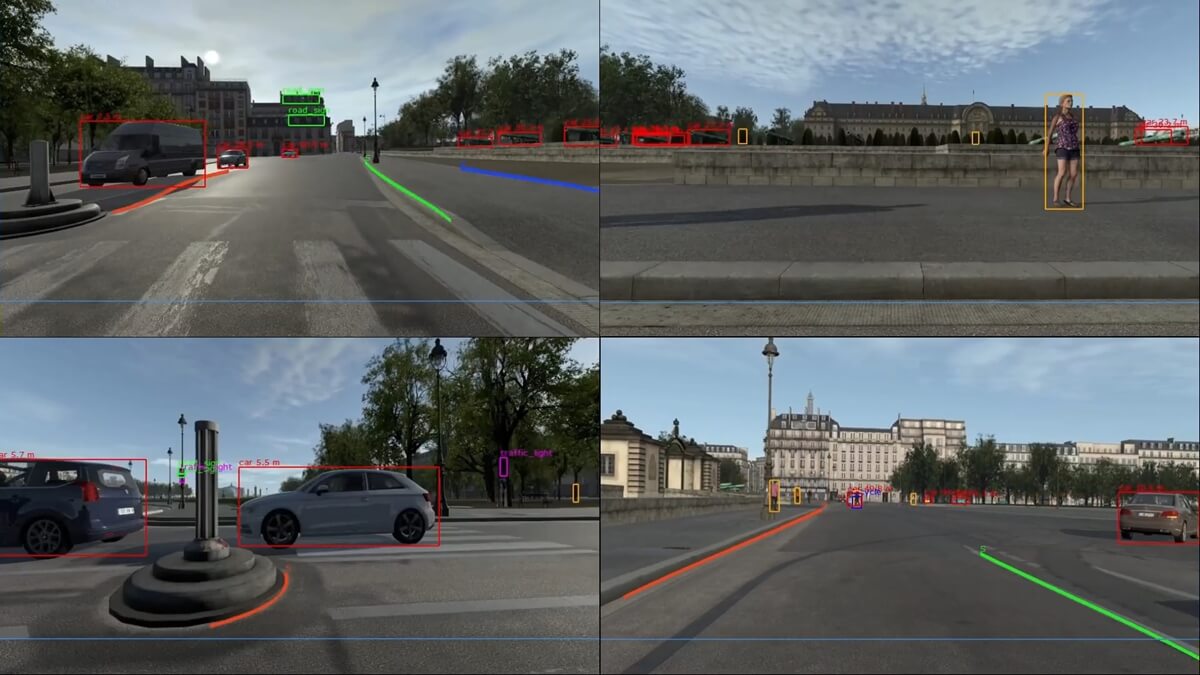
目前大多數系統所建構的運算模型,都以理想的傳感器運作來執行,以驗證自動駕駛車輛的演算法和控制系統,但這忽略了傳感器本身所可能發生的任何限制。例如:環境中不亮的照明、商店櫥窗玻璃的反射光…等等,這些都可能會破壞傳感器對車輛周圍環境的感知,從而導致潛在的災難性錯誤發生。所以對配備車聯網功能ADAS安全系統的自動駕駛車輛所進行的徹底驗證,必須包括傳感器識別環境特徵的能力。
在模擬過程中評估傳感器感知的能力很重要,因為未來的立法可能會允許在公共道路上使用之前,對任何自駕系統進行虛擬測試,合格後才能上路。因此,整個系統必須在完全具有代表性的虛擬環境中進行測試。
由於在大量不同環境中驗證自動駕駛汽車所需數億公里以上的大量里程,在真實世界中這樣做是不可行的。因此讓傳感器感知的測試,也會是最具挑戰性的項目,因為它需要物理上更準確的模擬與真實使用的傳感器之間,需具有高度相關性。其必須模擬車輛及其車載傳感器遇到的每個不同材料物體所產生的屬性。

rFpro技術總監Chris Hoyle解釋說到,「憑藉多年創建城市街道、鄉村道路和試車道…等等的模擬數據的經驗,我們了解模擬功能的複雜性,如:不斷變化的天氣條件或路面。我們的工程師不斷受到客戶的挑戰,以彌合模擬和現實測試之間的差距。無論是8立體聲、4K攝影影像,還是現場曝光控制、真實運動模糊建模,雷達模型甚至還會從行人移動手臂上拾取微型都卜勒數據來創建。所有這一切都必須成功進行模擬!」
註:都卜勒效應是波源和觀察者有相對運動時,觀察者接受到波的頻率與波源發出的頻率並不相同的現象,例如:遠方急駛過來的火車鳴笛聲,會逐漸音頻升高變得尖銳。
模擬過程的關鍵要素是包含一個準確的車輛模型,該模型以完全代表性的方式響應路面變化和控制輸入。透過rFpro的系統,還可以精確地模擬微小的路面差異,這意味著可以評估乘坐舒適性。其可以探索CAV識別(Connected Autonomous Vehicles)和避免坑洞的能力,就像人類駕駛一樣。如果沒有這個,乘客不太可能再次乘坐自動駕駛汽車。

此外,以前汽車業界軟體工程師與測試工程師的比例大約為1:1。Chris Hoyle相信未來正朝著航空電子行業靠攏,以後每個軟體工程師大約會有5名測試工程師一起偕同作業,以確保自駕車乘客的安全。
目前的英國政府相關項目dRISK,以正在使用rFpro軟體驗證傳感器模型與真實世界的關係,以便確認它們與實際傳感器相關聯。這被視為透過仿真實自駕系統端到端驗證的重要基石。
延伸閱讀:BMW推出下一世代自動駕駛D³測試平台 iNEXT車款Level 3自動駕駛的重要依據







