
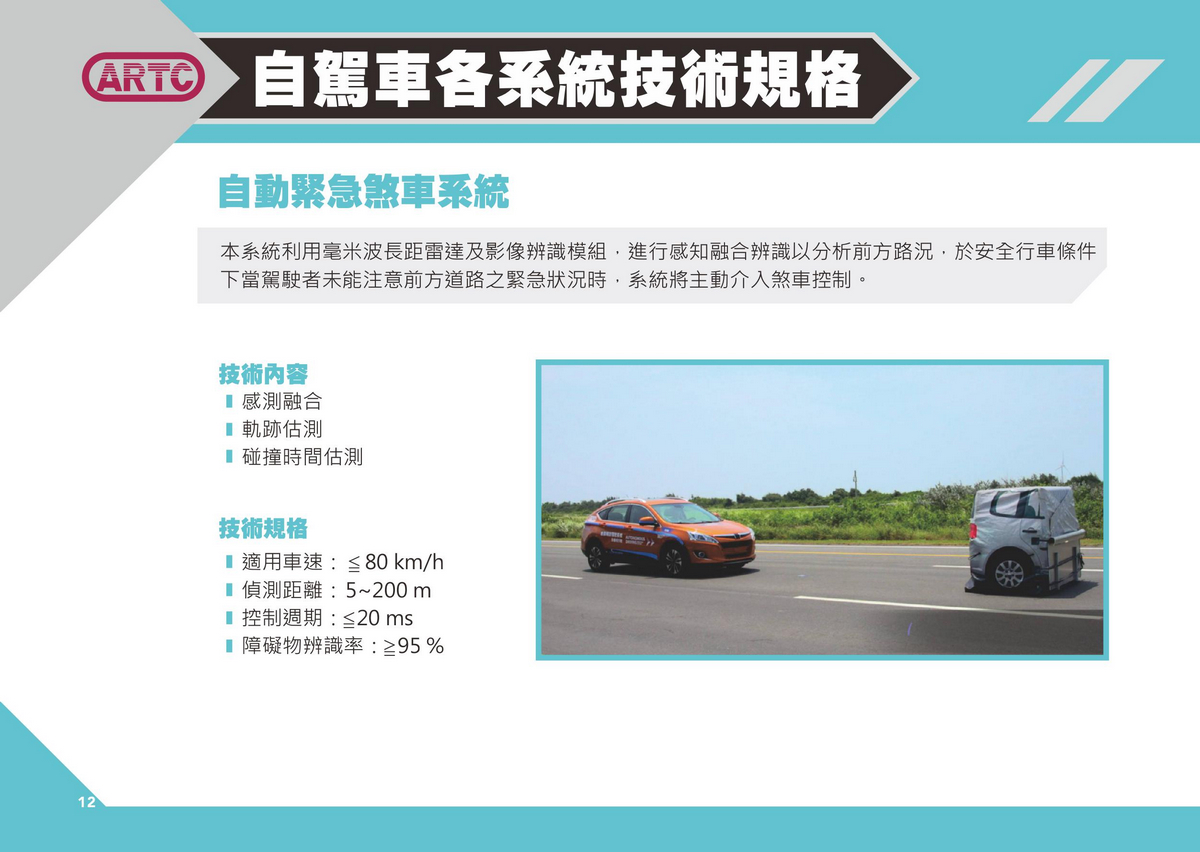
 ARTC展示自主研發自動駕駛技術,左車示範「定點接駁自駕車」、右車則展示「一般道路自駕車」
ARTC展示自主研發自動駕駛技術,左車示範「定點接駁自駕車」、右車則展示「一般道路自駕車」

在經濟部技術處科技專案支持下,ARTC近年來將研發能量投放在自動駕駛身上,從2007年起即投入先進駕駛輔助系統(ADAS)的研發,陸續發表了國人自主開發諸如盲點偵測、含行人偵測自動緊急煞車、自動停車輔助等令人為之驚豔的技術,歷年至今已成功對國內16家廠商11項ADAS的智慧關鍵技術轉移,將豐碩的研發成果落實技術移轉與產業商品化,進而扮演國產車駕駛輔助系統技術水平提升的推手!
 ARTC設定由高爾夫球車改裝的自駕車展演「定點接駁自駕車」,未來可以投入園區、大眾運輸等用途!
ARTC設定由高爾夫球車改裝的自駕車展演「定點接駁自駕車」,未來可以投入園區、大眾運輸等用途!

根據麥肯錫顧問公司研究,全球自駕車市場預估至2030年規模將達6.7兆美元,目前全球已有逾30家科技業者及車廠投入研發,市場潛能強大且後勢看漲。為了跟上世界潮流,同時扮演國內自駕技術的領導者,ARTC也在2014年起逐年發布自駕車成果,如今量產時機逐步成熟,更邀請媒體前往位於鹿港的ARTC中心一同體驗從電影走入現實的自動駕駛車輛,準備好心跳加速了嗎?

事實上,今年4月TARC台灣車輛研發聯盟(ARTC也是其中一員,擔綱研發要角)就曾趁著「台北國際汽車零配件與車用電子展」,以主題館的方式呈現國人自主研發的先進車用關鍵技術,還假南港展覽館場外首度開放民眾體驗「自動駕駛車」,顯然是對自家技術深具信心。
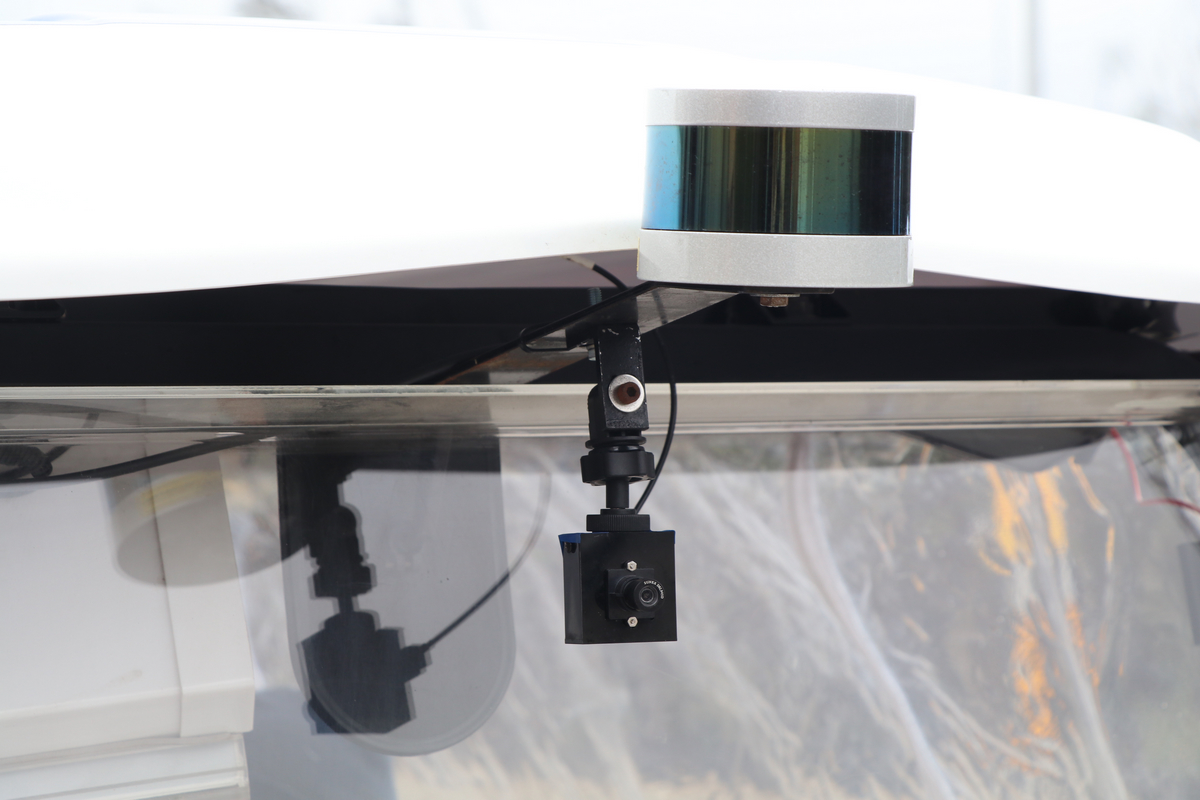 高爾夫球自駕車在車頂前方配備感測障礙物位置3D-LIDAR及辨識障礙物類別的攝影機,搭配車頂後方的高精圖資系統建構出完善的自駕環境
高爾夫球自駕車在車頂前方配備感測障礙物位置3D-LIDAR及辨識障礙物類別的攝影機,搭配車頂後方的高精圖資系統建構出完善的自駕環境


為了驗證自主研發自動駕駛技術的純熟以達準量產階段,ARTC特別於園區內規劃「定點接駁自駕車」,同時還首度將體驗情境拉到車輛中心外的鹿港彰濱工業區道路上展示「一般道路自駕車」,輔以國人10大常見駕車情境,驗證自主研發自動駕駛車的精準判斷與決策,讓自駕車不再只是「關起房門說暗話」,終於得以「打開天窗說亮話」!

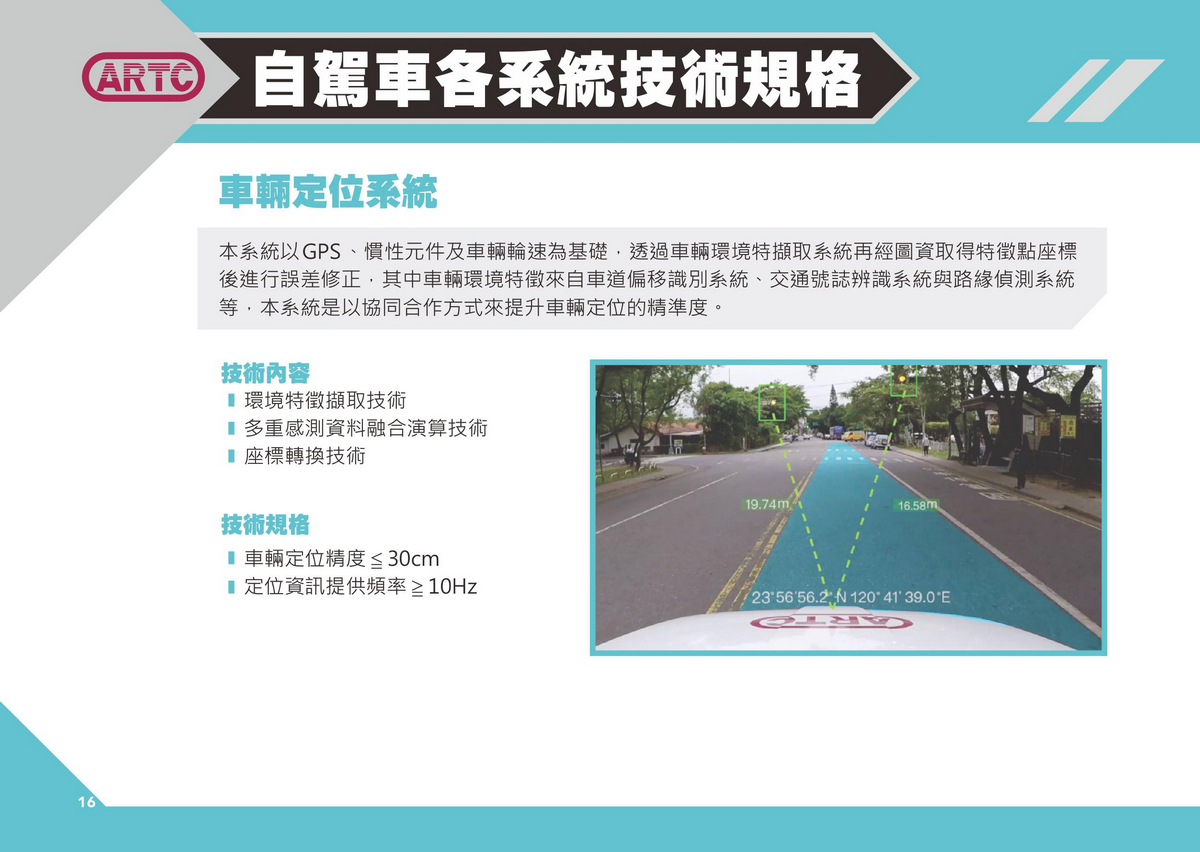
ARTC自動駕駛車運作原理,乃是利用3D-LIDAR、雷達與影像辨識等多感知融合技術提供道路環境資訊,透過精密的演算與決策,做出最適當的行駛判斷,再搭配轉向、油門與煞車等系統控制,可透過車載聯網智慧型裝置與外界溝通,實現自駕車遠端監控與智慧運輸接駁服務。

 透過高爾夫球車中央螢幕內建的選單系統點選設定停靠站,開啟自動駕駛模式後便會按照所設定的路徑定點接駁!
透過高爾夫球車中央螢幕內建的選單系統點選設定停靠站,開啟自動駕駛模式後便會按照所設定的路徑定點接駁!
 還可搭配ARTC開發的叫車服務APP,如此一來就可以知道哪些站點有乘客有搭車需求
還可搭配ARTC開發的叫車服務APP,如此一來就可以知道哪些站點有乘客有搭車需求
眼前這輛示範「定點接駁自駕車」技術的高爾夫球車,就是先前在南港展覽館展出的樣貌,只不過所有的感應設備與決策系統都更為進階。可別以為輛以高爾夫球車為範本改裝的自駕車看來陽春,連同車體及精密感知設備要價上看百萬元,包含車頂前方的負責辨識障礙物類別的攝影機、用來感測障礙物位置的3D-LIDAR、車頂後方負責導引車輛移動路徑的GPS/IMU/MAP精密圖資運算系統等都所費不貲,但麻雀雖小五臟俱全,自動駕駛對它來說可說是家常便飯,而這樣的概念未來也將在公車、遊園車等運輸工具上,於特定場區、路線上行駛,實現無人定點接駁。



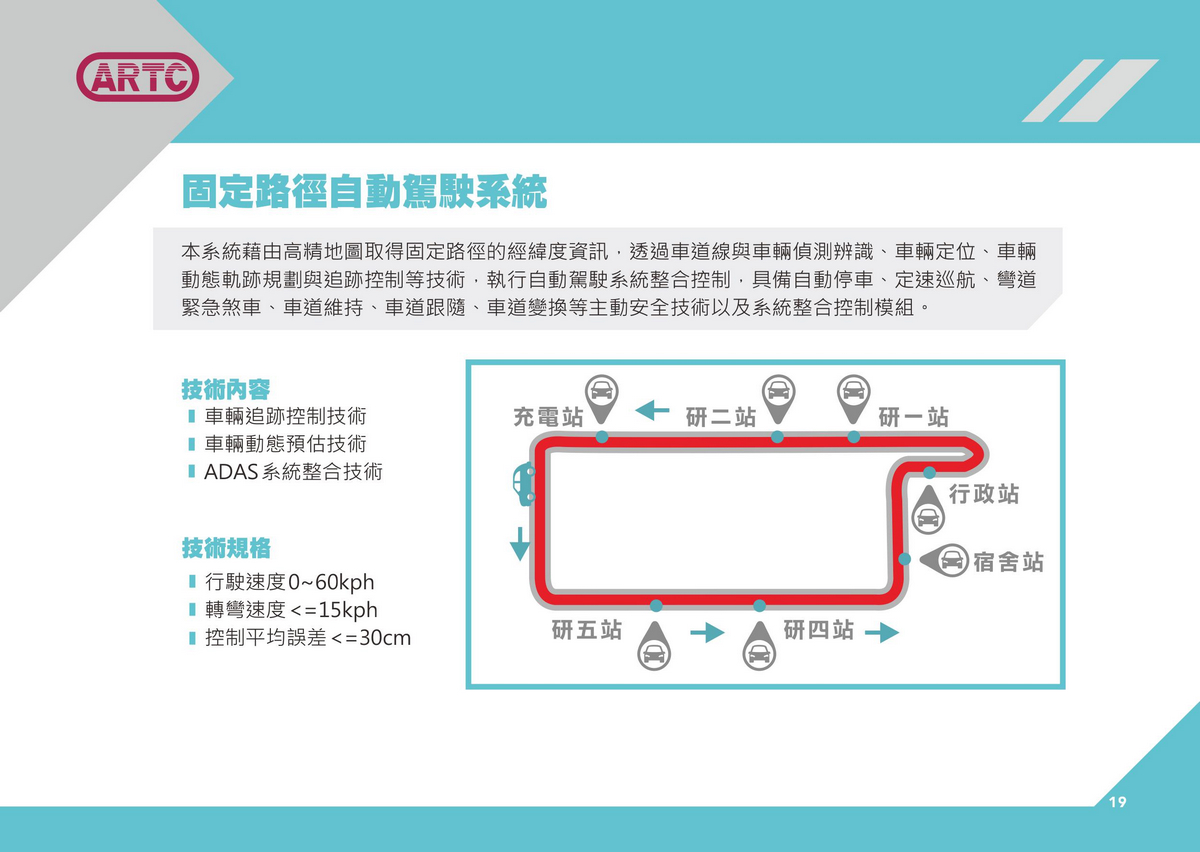
高爾夫球車自駕車設定為「定點接駁自駕車」,還搭配ARTC開發目前尚未對外發佈的APP叫車系統,操作人員可先透過手機點選想要去的站名並開啟自駕模式後,車輛便會依循原先設定的路徑以大約10-20km/h的車速前進,並由攝影機辨識站牌,搭配高精圖資事先輸入進站停放位置等資訊來完成定點接駁的任務,體驗的區域基本是環狀行駛,所以就連自駕車經常遭遇問題的彎路也是沒有問題,而且在整個體驗過程中也都是相當流暢的,少有因為系統問題而停止,而且系統也有設定安全模式,當訊息接收有不穩或有異常時,車速會自動放慢,並會要求轉回傳統人為操駕模式。
 透過影像辨識系統來判別行人、類型人及車輛(自行車/汽機車)搭配自動緊急煞車系統,就能持續不間斷的完成定點接駁自駕的任務!
透過影像辨識系統來判別行人、類型人及車輛(自行車/汽機車)搭配自動緊急煞車系統,就能持續不間斷的完成定點接駁自駕的任務!

當然,對於這輛定點接駁自駕車你肯定也會有很多疑問,比方說「如果路徑上出現障礙物或慢車」這該怎麼辦呢?別擔心,你想到的工程團隊早有辦法。透過攝影機影像式辨識系統、3D光達障礙物偵測系統連動,可偵測人、類行人、車(汽機車、腳踏車)等移動物體,最遠偵測距離可達100m,配合自動煞車的輔助完成自駕定點接駁的任務。不過,在與工程師閒聊之餘,問及自駕車能否判斷眼前明顯坑洞(主要是因為台灣爛路很多)並主動閃避的功能,工程師表示目前系統並無法執行這樣的任務,或許會加入未來改良的提案,不過為了安全考量,倘若為了閃避坑洞而改變車道或急停危險因子可能也會提高不少。
 「一般道路自駕車」由Luxgen U6改裝而成的自駕車來示範,除了跟高爾夫球車配備有攝影機、3D-LIDAR、高精圖資系統外,車頭還崁入感應障礙物位置的雷達
「一般道路自駕車」由Luxgen U6改裝而成的自駕車來示範,除了跟高爾夫球車配備有攝影機、3D-LIDAR、高精圖資系統外,車頭還崁入感應障礙物位置的雷達
體驗完負責定點接駁自駕車的高爾夫球車後,對於ARTC自駕技術心裡不由自主的打了個高分,但其實心裡在盤算的還是接下來要體驗的「一般道路自駕車」,畢竟自動駕駛的主戰場還是在一般道路上。此次展演的車輛改由Luxgen U6負責,除了與高爾夫球車一樣裝有攝影機、3D-LIDAR、GPS/IMU/MAP高精圖資之外,還加入了安裝在車頭前方的感應雷達,並針對車輛改裝轉向、油門、外掛煞車等部件。



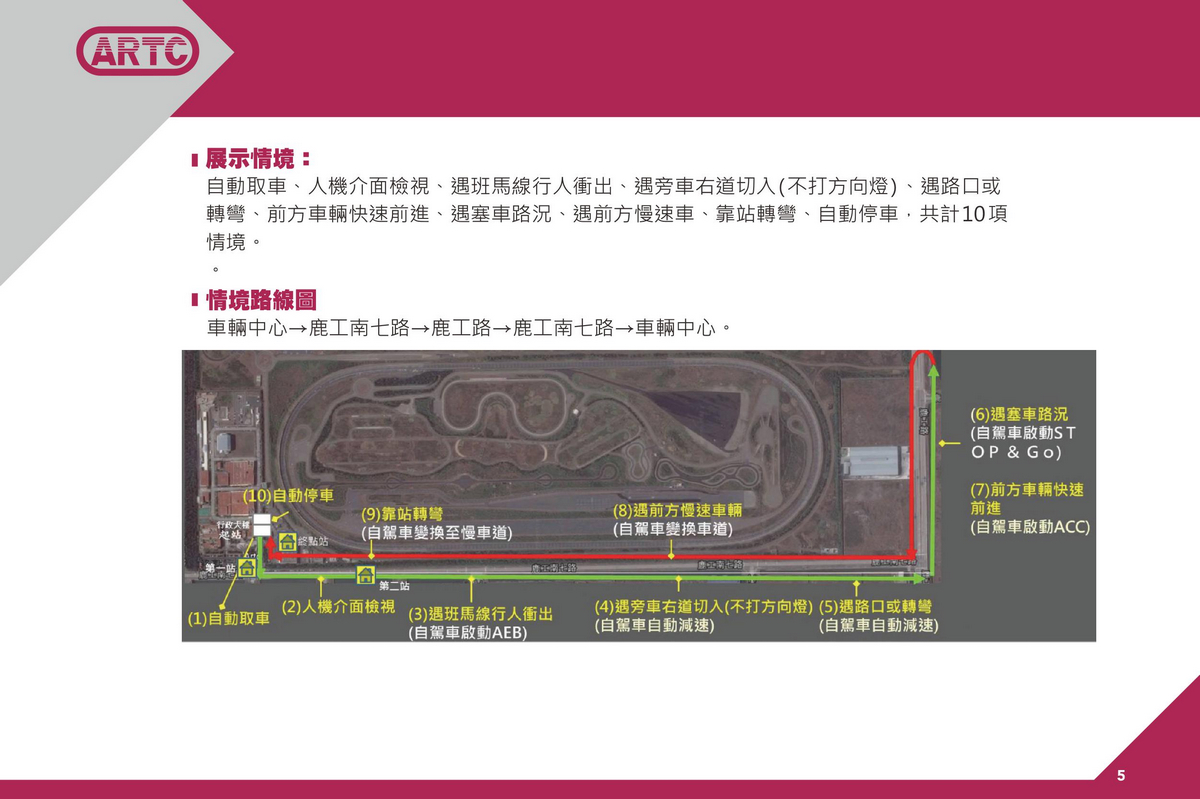
一般道路自駕車的體驗地點就選在ARTC外的鹿工南七路,以L型的方式完成繞行後,最後再返回ARTC內,雖然還是自動駕駛體驗,但在行駛在一般道路上心裡就多了幾分新奇與踏實。為了配合實際道路可能遭遇的狀況,ARTC規劃了不少情境,例如遇斑馬線行人衝出自動啟動AEB、遇旁車不打方向燈右道切入等都讓人印象深刻,因為這些正是馬路上經常出現的狀況,也就是你我俗稱的〝三寶〞。

 透過專屬手機APP「自動取車系統」連動自駕車及所設定的取車路徑,就可以如同科幻電影般來接送主人囉!
透過專屬手機APP「自動取車系統」連動自駕車及所設定的取車路徑,就可以如同科幻電影般來接送主人囉!

還沒出發就讓人驚艷,在自動取車功能的展演下,這輛由Luxgen U6改裝而成的自駕車在無人駕駛的情況下緩緩從遠方駛來,並精準的停在是先設定好的位置等待人員上車,說真的,還真的有科幻電影遠端叫車的感覺,不過實際上路後,為了安全起見還有法規需求,駕駛座還是必須有操作人員隨侍在側。
 啟動自動駕駛後,自駕車就會按照所設定路徑、車速自動移動,儘管當天示範自動緊急煞車的假人因為外頭風實在過大而被迫請假,但自駕車仍相當穩定在路經中行駛令人嘆為觀止
啟動自動駕駛後,自駕車就會按照所設定路徑、車速自動移動,儘管當天示範自動緊急煞車的假人因為外頭風實在過大而被迫請假,但自駕車仍相當穩定在路經中行駛令人嘆為觀止
有了自動取車的漂亮開場揭開一般道路體驗後,讓人對於之後的自駕體驗有了更深的期待,而ARTC的自駕技術果然也沒讓人失望。在操作員啟動自動駕駛後,U6自駕車就依照事先設定的車道及速度(以該路段速限40km/h為主)向前行駛,雖說由於當天風太大,扮演遇斑馬線行人衝出的假人無法配合演出有些美中不足。


 當啟動自動駕駛後,車內安裝的螢幕會顯示當時車速,並會以箭頭來顯示即將靠站的方向
當啟動自動駕駛後,車內安裝的螢幕會顯示當時車速,並會以箭頭來顯示即將靠站的方向
 當系統偵測到兩側路標線時,畫面會顯示雙虛線,即便沒有偵測到路標線(例如行經十字路口)也會透過高精圖資定位系統輔助車輛行駛的位置
當系統偵測到兩側路標線時,畫面會顯示雙虛線,即便沒有偵測到路標線(例如行經十字路口)也會透過高精圖資定位系統輔助車輛行駛的位置
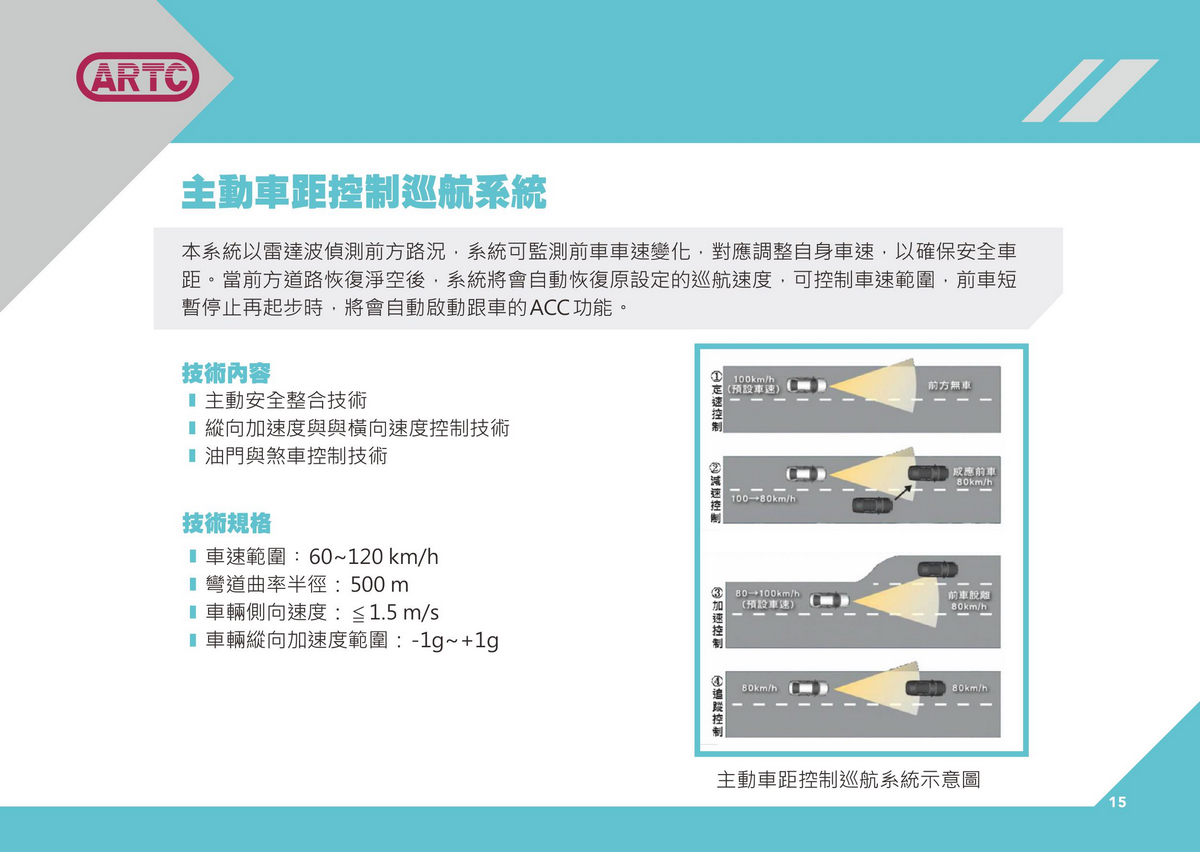
即便如此,U6自駕車仍相當穩定的保持在設定車道內運行,即便行經沒有可判讀標線的十字路口,依然能依循原有路線前進,此時一般道路情境開始加入,首先遭預旁車未打方向燈逕行切入車道時,U6自駕車會自動剪速,當前方車輛快速前進且行駛同一車道時,系統便會自動啟動ACC跟車,即便是遇到前方慢車,系統也會透過感知系統偵測確認後方無來車後,便會一氣呵成的自動變換車道,當靠近所設定的目的地時,還會變換至慢車道準備進站,雖然體驗時間不過短短幾分鐘,但心裡的疙瘩早已掉滿地,如果不是親身體驗真的很難相信,台灣自駕車技術絲毫不遜於國際大廠!



自動駕駛被視為未來趨勢,台灣研發實力看來是有跟上勢頭,而且技術實力也頗具水準,如何將之應用在國產車上或是尋求國外買主,考驗著相關單位的決策力,自動駕駛所帶起的車聯網、物聯網新時代或許是下一階段努力的方向,當然電影玩命關頭7也演譯了自動駕駛被駭入變成的「殭屍車」,所謂的個資安全問題或許就是自動駕駛氾濫後必須面臨的問題!






